Реферат: Исследование системы программного регулирования скорости вращения рабочего органа шпинделя
Реферат: Исследование системы программного регулирования скорости вращения рабочего органа шпинделя
ИНСТИТУТ ИНТЕГРАЦИИ МЕЖДУНАРОДНЫХ
ОБРАЗОВАТЕЛЬНЫХ ПРОГРАММ
КГНУ
Кыргызско-Американский Факультет Компьютерных
Технологий и ИНТЕРНЕТ (КАФ-ИНТЕРНЕТ)

Курсовая работа
По
курсу: « Основы теории управления »
Тема:
« Исследование системы програмного
регулирования скорости вращения рабочего
органа шпинделя »
Выполнил:
студент гр. КИС-3-97
Краснов И.С.
Проверил: преподаватель
Алишеров С. А.
Бишкек – 1999
СОДЕРЖАНИЕ:
ВВЕДЕНИЕ....................................................................................................................................................................................... 2
Исходные данные................................................................................................................................................................ 3
1.Структурная схема системы................................................................................................................................. 5
2. Определение коэффициента усиления электронного усилителя по
заданной точности. 7
3. Определение устойчивости системы методом Михайлова А.Б.......................................... 9
4. Коррекция системы..................................................................................................................................................... 10
4.1. Построение ЛАЧХ корректирующего устройства.......................................................................................... 10
4.1.1. ЛАЧХ разомкнутой нескоректированной системы Lнс (w)........................................................................ 10
4.1.2. ЛАЧХ желаемой системы Lж(w)........................................................................................................................ 11
4.1.3. ЛАЧХ корректирующего устройства Lк(w)..................................................................................................... 12
4.2. Техническая реализация корректирующего устройства........................................................................... 13
I-Звено:...................................................................................................................................................................................... 13
II-Звено:..................................................................................................................................................................................... 14
III-Звено:................................................................................................................................................................................... 14
IV-Операционный усилитель:............................................................................................................................................. 15
4.3. Проверка правильности выбора корректирующих звеньев.......................................................................... 16
5. Построение переходного процесса и определение прямых
показателей качества. 17
ЗАКЛЮЧЕНИЕ............................................................................................................................................................................. 18
СПИСОК ЛИТЕРАТУРЫ.......................................................................................................................................................... 19
ВВЕДЕНИЕ
Курс теории автоматического
управления ставит своей целью ознакомить с общими принципами построения систем
автоматического управления, с процессами в этих системах и методами их
исследования. Принципы построения систем автоматического управления связаны с
общими законами управления, значение которых выходит далеко за пределы
технических задач.
Теория автоматического управления
сформировалась в самостоятельную науку, в первую очередь на основе изучения
процессов управления техническими устройствами. Изучение принципов построения и
исследования систем автоматического управления в курсе ОТУ проводится на основе
рассмотрения управления различными техническими устройствами, и первое понятие,
которое конкретизирует довольно широкое поле деятельности этого курса является
автоматическое регулирование. Под автоматическим регулированием понимают
поддержание на определенном уровне или изменение по закону некоторых переменных
характеристик (регулируемых величин) в машинах и агрегатах без участия человека
с помощью различного рода технических средств.
Рассматриваемые принципы управления
имеют более широкий общий смысл и могут быть применены при изучении процессов
управления в совершенно иных системах, например, в биологических,
экономических, социальных и др.
Исходные данные
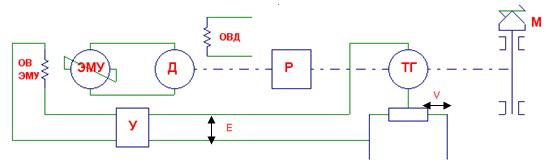
Задана система програмного регулирования скорости вращения рабочего органа
шпинделя.
Рис. 1
На
рис.1 использованы следующие обозначения:
ü
ОВ ЭМУ – обмотка возбуждения ЭМУ.
ü
ЭМУ - электромагнитный
усилитель.
ü
Д - двигатель постоянного тока
ü
ОВД – обмотка возбуждения двигателя.
ü
Р – редуктор.
ü
ТГ – тахогенератор.
ü
У – электронный усилитель.
ü
E - ошибка рассогласования.
ü
V - скорость изменения напряжения.
ü
М – момент инерции шпинделя.
Система регулирования работает следующим образом: с
электронного усилителя У усиленный сигнал рассогласования Е поступает
на обмотку возбуждения ЭМУ (ОВ ЭМУ), ток, проходящий через ОВ ЭМУ
меняется, изменяя тем самым величину магнитного потока, действующего на
ротор электромагнитного усилителя (ЭМУ) - увеличивая или уменьшая
скорость его вращения, и в зависимости от этих изменений
меняется скорость и направление вращения двигателя (Д). Двигатель (Д),
редуктор (Р), тахогенератор (ТГ) и шпиндель находятся в жесткой
механической связи, поэтому изменения в скорости и в направлении вращения
двигателя вызывают соответствующие изменения в скорости и в направлении
вращения рабочего органа шпинделя, а также в работе тахогенератора (ТГ),
который передвигает ползунок реостата в сторону изменения ошибки несогласования
E.
Требуется:
1.
Составить структурную схему и
вывести уравнения, которыми описываются отдельные элементы и вся система
регулирования в целом. Определить коэффициент усиления усилителя из заданной
точности.
2.
Определить устойчивость и качество
переходных процессов в системе с помощью частотных методов.
3.
Скорректировать систему.
4.
Построить переходный процесс в
системе и оценить его качество.
Дано:
|
Тэ1
|
Тэ2
|
Тд
|
Кэму
|
Кд
|
Кред
|
Ктг
|
E,%
|
V
|
| 0,1 |
0, 7 |
2,5 |
4 |
3 |
2 |
0,1 |
0,4 |
0,5 |
1.Структурная схема системы.
На
основании принципиальной схемы (рис. 1) составим структурную схему (рис. 2) и
рассмотрим все ее элементы для получения передаточной функции всей системы.

Рис. 2
1.1
Усилитель.
 
 (1)
(1)
где Ky – коэффицент усиления электронного усилителя.
1.2
ЭМУ
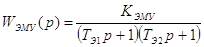 (2)
(2)
где
Кэму- коэффицент передачи ЭМУ;
Тэ1,Тэ2 - постоянная времени ЭМУ.
1.3
Двигатель
 (3) (3)
где Кдв- коэффицент передачи двигателя
постоянного тока.
Тдв - постоянная времени двигателя
1.4
Редуктор

 (4) (4)
где Кред - коэффициент
передачи редуктора
1.5
Тахогенератор

 (5) (5)
где Ктг - коэффициент передачи
тахогенератора
Пользуясь (рис. 2) и формулами (1-5) составим
передаточную функцию разомкнутой системы
 (6)
(6)
Подставив исходные значения, получим
 (7)
(7)
2. Определение коэффициента усиления
электронного усилителя по заданной точности.
Установившаяся ошибка замкнутой САУ складывается из
двух составляющих:
 (8)
(8)
где  -ошибка от задающего воздействия, -ошибка от задающего воздействия,
 -ошибка
от возмущения f(t). -ошибка
от возмущения f(t).
Передаточная функция замкнутой системы по ошибке будет
иметь вид:
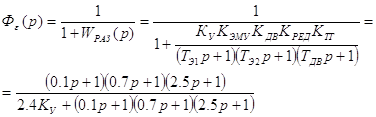
пусть
f(t) 0, тогда 0, тогда
 (9)
(9)
Для любого воздействия ошибку
можно найти с помощью коэффициентов ошибок, когда
 (10)
(10)
Из 9 и 10 получаем:
 (11)
(11)
С1,С2,С3,…-коэффициенты
ошибок, которые можно найти по следующим выражениям:
Так как мы имеем статическую систему, то
 (12)
(12)
По условию  , тогда , тогда

Подставим полученное значение в (7):

Тогда передаточная функция замкнутой системы будет:
 (13)
(13)
3. Определение устойчивости системы методом
Михайлова А.Б.
Характеристическое уравнение системы имеет вид:

где

 (14)
(14)
Заменив в (14) комплексную переменную р мнимой
переменной jw, получим функцию мнимого переменного jw, в котором w может принимать
любое значение от +  до - до -  : : 
 (15)
(15)
Так как  ,а ,а  , то четные степени jw
вещественны, а нечетные линейны , то четные степени jw
вещественны, а нечетные линейны

Разделив вещественную часть от мнимой получим:
 , ,
где
 -вещественная
часть функции А(jw) -вещественная
часть функции А(jw)
 -мнимая
часть функции А(jw) -мнимая
часть функции А(jw)
Критерий Михайлова можно сформулировать в виде условия
перемежаемости корней, т.е. если W0,W2,W4 -
упорядоченные корни мнимой составляющей А(jw), а W1 и W2 -
упорядоченные корни вещественной составляющей А(jw), то для устойчивости
системы необходимо и достаточно выполнения неравенства:
 (16)
(16)
Корни 
W0=-4.342;
W2=0;
W4=4.342.
Корни 
W1=-10.989;
W3=10.989.
Подставив  в (16): в (16):

Видим, что неравенство не верно, значит условные
устойчивости не выполняется. Отсюда следует, что система неустойчива и
нуждается в коррекции.
4. Коррекция системы.
Выбираем последовательную коррекцию. Коррекция системы
состоит из нескольких этапов:
1.
Построение ЛАЧХ корректирующего
устройства.
2.
Техническая реализация
корректирующего устройства
3.
Проверка правильности выбора
корректирующих звеньев.
Чтобы построить ЛАЧХ корректирующего
устройства необходимо:
1.
Построить ЛАЧХ разомкнутой
нескоректированной системы Lнс (w).
2.
Построить ЛАЧХ желаемой системы Lж(w).
3.
Путем графического вычитания Lж-Lнс получить ЛАЧХ корректирующего
устройства Lк(w).
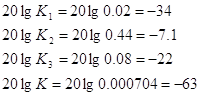
ЛАЧХ разомкнутой нескоректированной системы будет иметь вид:
Lнс(w)=20 lg / / /
Для
построения Lнс найдем опорные частоты:
20lgK
= 20lg249=48 дб
4.1.2.
ЛАЧХ желаемой системы Lж(w).
ЛАЧХ желаемой системы построим по методу
Солодовникова.
Пусть величина перерегулирования переходного
процесса равна G=25%, а время регулирования системы должно быть меньше
постоянной времени двигателя, чтобы он успевал обрабатывать управляющее
воздействие, т.е.

По номограммам Солодовникова (рис.3)
определим tp, запас по фазе  и
запас по амплитуде Lзап : и
запас по амплитуде Lзап :




Частота среза ЛАЧХ находится из условия:

ЛАЧХ желаемой системы разбивается на три
участка:
ü
Низкочастотный участок строиться с наклоном –20Vдб\дек,
где V – порядок астатизма системы. Т.к. в данной системе
V=0, то наклон будет – 0 дб\дек.
ü
Среднечастотный участок строится с наклоном – 20дб\дек до
пересечения с линиями  с некоторым
запасом. с некоторым
запасом.
ü
Высокочастотный участок строится из расчета наименьшей разницы
с Lнс (w)
Построение ЛАЧХ желаемой системы начинают со
среднечастотного участка.
Построение ЛАЧХ показано на рис 4.
По ЛАЧХ Lж(w)
можно найти передаточную функцию желаемой системы:

Из формул передаточная функция
корректирующего устройства будет иметь вид:

где 
Для проверки
запасов по фазе и амплитуде необходимо построить ЛФЧХ желаемой системы (рис.4).

|

|

|
| 1.1 |
-24.8 |
| 2.5 |
-47.3 |
| 10 |
-85.1 |
| 130 |
-181.1 |
При частоте, на которой  пересекает пересекает  запас по амплитуде
системы равен Lзап =16.5 дб, т.е.
запас по амплитуде соблюдается по сравнению с заданным (16 дб). запас по амплитуде
системы равен Lзап =16.5 дб, т.е.
запас по амплитуде соблюдается по сравнению с заданным (16 дб).
Запас по фазе находится как расстояние между
точками  и и  на частоте среза Wс=20. Получено значение на частоте среза Wс=20. Получено значение  ,
т.е. запас по фазе также соблюдается по сравнению с заданным ( ,
т.е. запас по фазе также соблюдается по сравнению с заданным (  ). ).
Следующим этапом коррекции системы является
реализация корректирующего устройства, которое представляет собой набор
четырех-полюсников.
Представим передаточную функцию корректирующего
устройства в виде набора звеньев:

I-Звено:
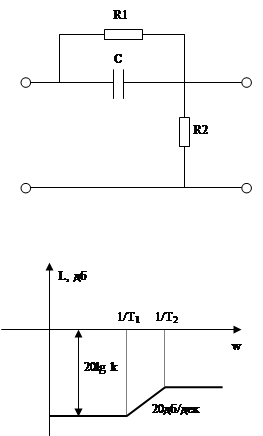
Выберем
RC-цепочку, представленную на рис. 5
своей
принципиальной схемой и логарифмической
амплитудно-частотной
характеристикой.
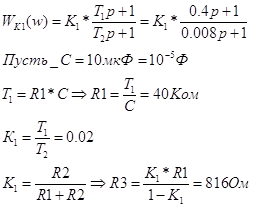
Рис.5
II-Звено:
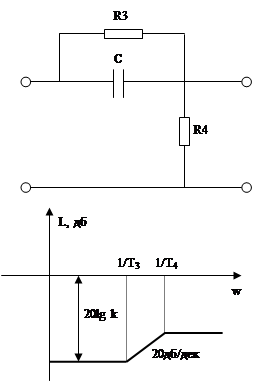
Выберем
RC-цепочку, представленную на рис. 6
своей
принципиальной схемой и логарифмической
амплитудно-частотной
характеристикой.
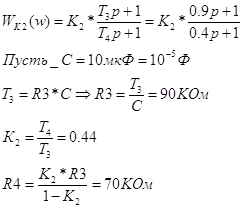
Рис. 6
III-Звено:
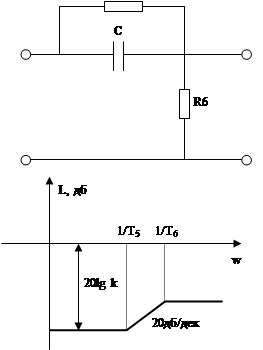 Выберем
RC-цепочку, представленную на рис. 7 Выберем
RC-цепочку, представленную на рис. 7
своей
принципиальной схемой и логарифмической
амплитудно-частотной
характеристикой.
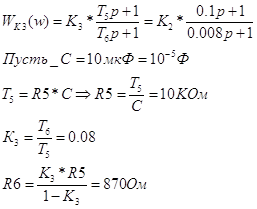
Рис. 7
Т.о.
коэффициент усиления корректирующего звена будет:

необходимо
ввести операционный усилитель, чтобы получить Кк=0,014.
IV-Операционный усилитель:
Принципиальная
схема операционного усилителя
и
его краткая форма представления показана
на
рис. 8. Определим его параметры:
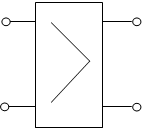
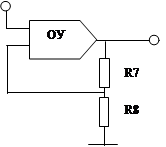
Рис. 8
После
чего схема корректирующего устройства будет иметь вид:
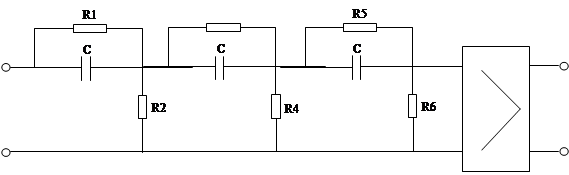
Рис.
9
Проверка
правильности выбора корректирующих звеньев состоит из трёх этапов:
ü
Построить ЛАЧХи всех
корректирующих звеньев.
ü
Построить результирующую ЛАЧХ
Lрез(w).
ü
Сравнить Lрез с ЛАЧХ корректирующего устройства Lк(w).
Из рис.10 можно сделать
вывод, что корректирующие звенья выбраны правильно.
5. Построение переходного процесса и определение
прямых показателей качества.
Перехолным
процессом называется реакция системы на подачу ко входу единичного скачка 1(t):
Построим
переходный процесс с помощью компьютерной программы и определим прямые
показатели качества (рис. 11).
К
прямым показателям качества относятся:
1.
Время регулирования:

при 
Определяется точкой
последнего попадания графика h(t) в пятипроцентную зону G=0,05. Задано
tp=0,4, а получено по графику (рис. 11) tp=0,35.
2.
Относительное перерегулирование
Определяется
величиной выброса hmax
относительно Lуст.
Задано
G=25%, а получено G=0%.
3.
Максимальное перегулирование : Lmax=1
4.
Время наступления Lmax
: tmax=0.2
ЗАКЛЮЧЕНИЕ
Мной рассмотрена система
программного регулирования рабочим органом шпинделя.
Я построил и описал систему,
отвечающую всем качественным требованиям варианта № 7.Были получены
определенные значения и показатели, характеризующие данную систему.
В частности:
q для заданной точности был найден коэффициент усиления всей
системы.
q по структурной схеме была получена передаточная
функция разомкнутой системы  , а по
последней - передаточная функция замкнутой системы Ф(Р). , а по
последней - передаточная функция замкнутой системы Ф(Р).
q система была проверена на устойчивость частотным
методом Михайлова, и в последствии для неё было выбрано последовательное
корректирующее устройство
q для системы был построен переходной процесс, по
которому я определил прямые показатели качества системы.
Работа содержит достаточно информативные
графики и рисунки, которые совместно с текстовым пояснением и формулами
помогают легко разобраться в сути данного исследования.
СПИСОК ЛИТЕРАТУРЫ
- Методические указания по
курсовой работе.
- Воронов А.А. “Основа и
теория автоматического управления” Часть 1, Москва 1965г.
- Теория автоматического
управления под редакцией А.В. Петушила, Часть 1, Москва 1968г.
|